MENU
手足を使用して環境との接触を伴う動作の計画および制御手法の開発
実環境でのヒューマノイドロボットの利用を実現するため、歩行だけでなく様々なロボットの動作計画を目指す。 ヒューマノイドロボットでは、手足や肘、膝を使った環境との接触が重要となるため、このような多点接触制御の研究を行っている。
ヒューマノイドロボットを利用した支援機器等の評価に関する研究
詳しくみる→
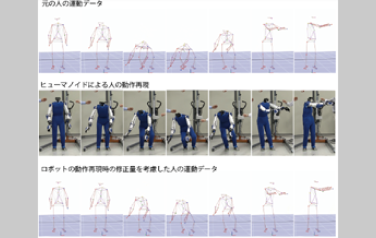
人間らしい動作をヒューマノイドロボットで実現する手法の開発