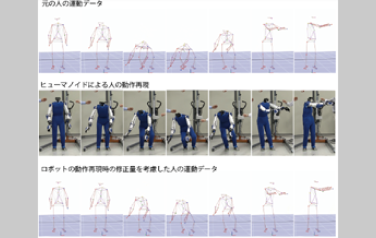
動作リターゲティング
人間らしい動作をヒューマノイドロボットで実現する手法の開発
詳しくみる→

ヒューマノイドロボットは人と近い身体構造を持ち、人用にデザインされた製品をそのまま使用できる。さらにロボットが人の動作を再現することで、ロボット内部のセンサにより運動情報や力負担を定量的に計測できる。こうした物理シミュレータとしてのヒューマノイドロボットの応用例として、装着型アシスト機器評価に関する研究を行っている。
マッスルスーツを装着した動作の計測
ロボットによる同一動作のシミュレーション
ロボットによる同一動作の実現
