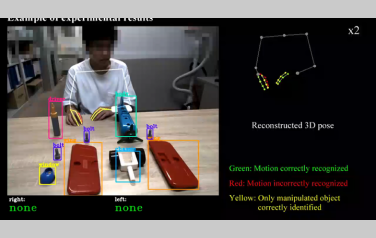
人の作業動作認識
複数カメラ画像から動作の自動分割と認識を行う手法を開発
詳しくみる→

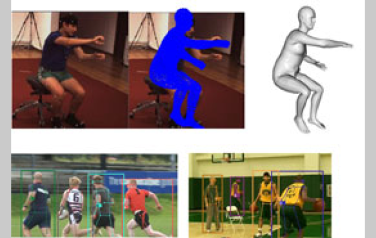
パワーアシスト/スキルアシストのためのアシストスーツの実験的検証とシミュレーション手法開発を行っている。本研究では、ロボットの運動制御技術、ディジタルヒューマン技術、筋骨格解析技術を応用し、アシストの効果を含むシミュレーション手法の構築を目指す。また、ワイヤとモータを利用してアシスト力を発生する実験用のアシストスーツを開発し、アシスト力の動作タイミング、方向、大きさと人の動作変化の関係を求めるための基礎的な実験を行う。