MENU
深層学習を利用した物体の6自由度の姿勢認識アルゴリズムに関する研究
深層学習を用いた物体の6自由度(位置・姿勢)姿勢認識アルゴリズムを開発している。認識結果を利用して3Dモデルを点群データに当てはめることにより、ロボットがピックアンドプレースなどの物体操作を行うことができる。ロボットアームの物体操作時の手先軌道や移動ロボットの移動軌跡など、動きを学習する技術開発にも取り組む。 機械学習に基づいた物体操作
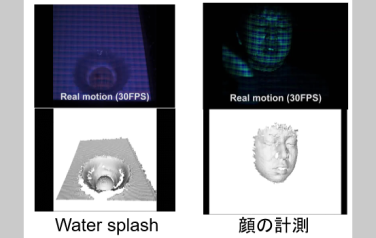
ハイスピードカメラを用いた高速な事象の形状計測に関する研究
詳しくみる→
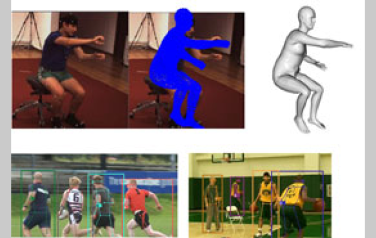
深層学習を用いた人間の姿勢推定に関する研究
3次元形状計測による人間の状態推定に関する研究